

D(samples) = Chain(Dense(samples=>100, relu), Dense(100=>50, relu), Dense(50=>1, σ))
G(input, samples) = Chain(Dense(input=>50, relu), Dense(50=>1000, relu), Dense(1000=>samples, x->0.5*tanh(x), bias=false))
lossD(x, y, dsc) = -mean(y.*log.(dsc(x))) .- mean((1 .- y).*log.(1 .- dsc(x)))
lossG(z, gen, dsc) = -.mean(log.(dsc(gen(z))))
# Training functions
function train_discriminator(dsc, gen, gendata, real_data, batch, opt)
data = DataLoader(hcat(gendata, realdata), batchsize=batch, shuffle=true)
Flux.train!(lossD, Flux.params(dsc), data, opt)
Flux.train!(lossG, Flux.params(gen), gendata, opt)
endGenerative Adverserial Networks
Generative Modelling with Neural Networks
Nicholas Gale and Stephen Eglen
What are GANs
GANs are a generative model of neural networks
They learn a statistical distributions properties.
They can then be used to generate samples from that distribution.
Famous examples are style transfer and face generation.
The Basic Idea
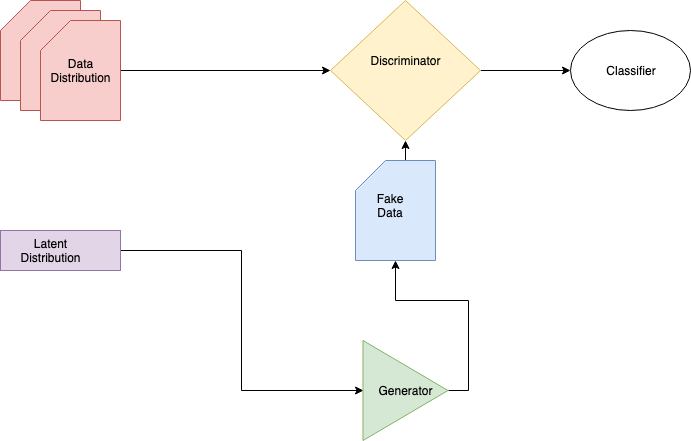
A GAN is really a composition of two models: a generator and a discriminator.
The generator is trained to trick the discriminator.
The discriminator is trained to filter real data from fake.
The goals are opposed: adverserial.
Components
- Suppose the data are generated from some distribution: \[ x \sim \text{Dist}(\alpha...) \]
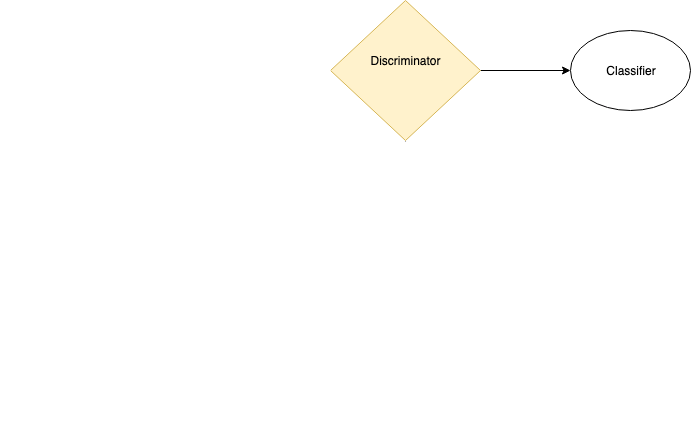
- The discriminator is a function mapping to a binary target: \[ D \rightarrow \{ 0, 1 \} \]
- The generator \(G\) takes a latent vector \(z \sim U(0,1)^k\) and generates a fake data sample: \[G(z) = y \sim \text{Dist}_\text{Gen}(\alpha^\prime \ldots) \]
- The training goal is to approximate the data generating distribution: \[ \text{Dist}_\text{Gen}(\alpha ^\prime \ldots) \approx \text{Dist}_\text{Data}(\alpha \ldots) \]
Construction
\(G\) and \(D\) are arbitrary probability transforms.
Neural networks are common choices: generalised functions.
Desirable to use data to inform network architecture.
Loss Functions
The discriminator is acting as a binary classifier.
The natural loss function is
logitcrossentropy: \[ L = -E_{x\in\text{Dist}_\text{Data}} [\log(D(x))] - E_{y \in \text{Dist}_\text{Gen}}[\log(1-D(G(z))]\]
Discriminator Loss
The discriminator aims to minimise the above loss.
The generator is targeting a vector in the data distribution.
For labelled data \((x,y)\) this reduces to: \[ L_D(x, y) = -y\log(D(x)) - (1 - y) \log(1 - D(x))\]
Generator Loss
The generator is aiming to trick the discriminator.
Natural reward is to flip the classification loss.
It doesn’t need to know the data: this is implicitly learned. \[ L_G(z) = -\log(D(G(z))) \]
Training
Training proceeds in a two-step fashion.
First, batches are presented to the generator and G updated.
Second, batches are presented to discriminator and D updated.
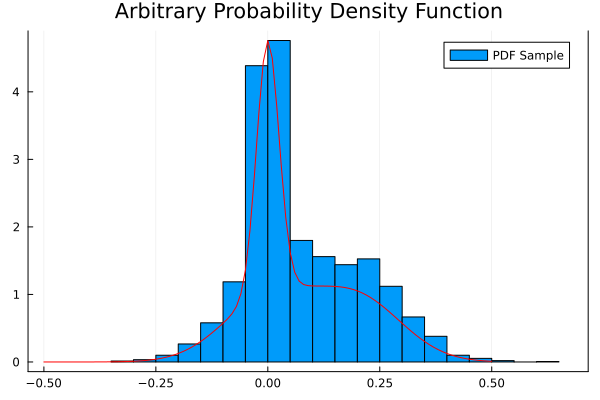
A simple example
Consider a non-trivial probability distribution:
Training Code
Result
Game Theory
\(G\) and \(D\) are playing a two player game.
This loss function is a min-max game.
Training converges to a Nash equilibrium.
The global minima of the game is \(\text{D}_\text{Data}(\alpha \ldots) = \text{D}_\text{Gen}(\alpha^\prime \ldots)\)
MNIST
A famous dataset of handwritten numbers.
Very common machine learning benchmark.
![]()
MNIST Sample

Instability
GANs are difficult to train even on simple data such as MNIST.
Getting a GAN to converge is often a case of “machine teaching”.
This is valuable in and of itself - helps construct the mental model of the problem.
There are some common GAN instabilities: saturation and mode collapse.
Loss Saturation
The min-max loss function often saturates: the gradients go to zero.
This can happen when the discriminator gives an overly confident rejection.
Less of a problem with Wasserstein Loss GANS.
Loss Saturation

Saturation Fixes
Adjust learning rate down for the discriminator.
Change discriminator complexity.
Apply dropout and other regularisation techniques.
Mode Collapse
The generator doesn’t know the variability of the data.
It can produce a very reliable subset which tricks the generator.
This is known as mode-collapse: the target data is a composition of modes.
Mode Collapse
Mode Collapse Fixes
Increase latent size: more degrees of freedom to optimise.
Modify optimiser and learning schedule: a slower rate helps.
Regularisation: dropout and normalisation are useful.
Training Practice
GANs should be monitored.
Leverage your visual system: loss, discriminator accuracy, and generated data.
Generator and discriminator loss should be separated.
Real and fake accuracy should be separated.
Regularisation
Mode collapse is often related to Lipschitz continuity being violated in the discriminator: gradient penalty mechanism.
Weight normalisation is often performed through Spectral Normalisation: \[ L += \sqrt{\Vert W \Vert_1 \Vert W \Vert_\infty} \]
Regularisation Tricks
Discriminator is trained with multiple updates for each generator update.
Wasserstein loss (Earth Movers Distance) redefines the game to arbitrary maximimisation - not classification.
Usual regularisation on individual networks: dropout, early stopping etc.
Data Augmentation
A useful feature of GANs is data augmentation: supplementing data when there is none.
We simply generate data by sampling in the latent space and passing it through the generator.
This is only useful when we are certain the GAN has converged correctly -serious error potential.
Any mismatch between reality and generator will carry to downstream analysis.
Problem: How to control variance?
A problem in experimental sciences: day-to-day variance, and experimenter-experimenter variance.
Same underlying biology (or other natural phenomena).
We would like to remove the bias introduce by different experiments.
Batch Equalisation
A modern approach is to use GANs as a style transfer for data.
The batch data is passed through a generator to look like “real” data which is trained concurrently with a generator.
This removes the inter-batch variance and cleans up the dataset.
Summary
A GAN is a two-player game between a generator model and a discriminator model.
The discriminator classifies real/fake data and the generator plays to trick it.
The game is globally minimised when the generator matches the data-generating distribution.
The generator can be used to analyse a distribution, augment/generate data, and normalise datasets.
References
Generative Adversarial Nets, Goodfellow et. al. (2014)
Wasserstein generative adversarial networks, Arkovsky et. al. (2017)
Batch equalization with a generative adversarial network, Qian et. al. (2020)